
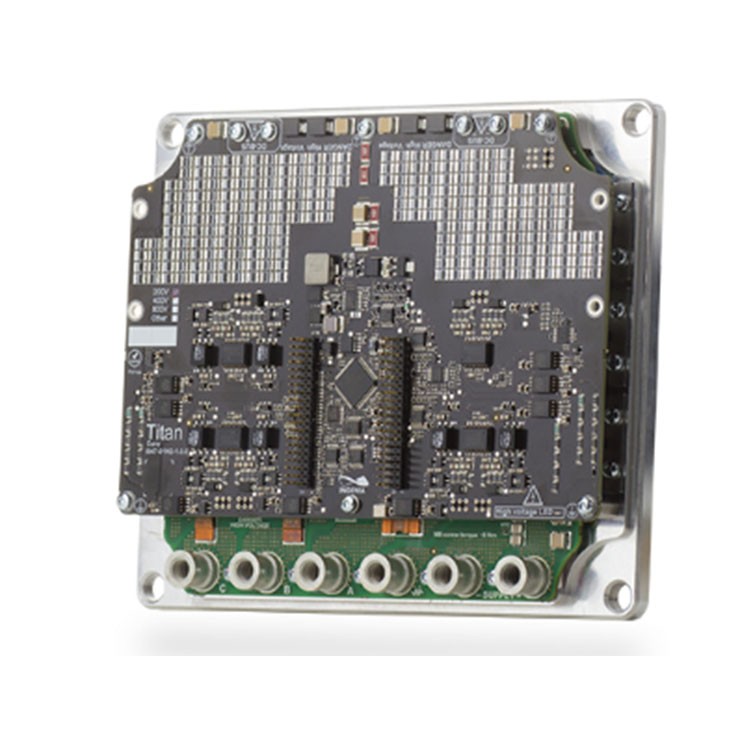
INGENIA TITAN大电流直流驱动器
1.INGENIA TITAN大电流直流驱动器电气参数
1)连续电流(ARMS):200
2)峰值电流(ARMS):300
3)供电电压(VDC):12-800
4)功率(W):40000
5)尺寸(mm):172x206x30
6)通讯:USB,RS232/RS485,CANopen,EtherCAT
7)命令源:网络接口,独立运行,模拟量输入,脉冲+方向,编码器跟随,电子齿轮,PWM
8)支持反馈:数字编码器,Sin/Cos编码器,数字/模拟霍尔,旋转变压器,SSI,无传感器,直流测速机,模拟输入,PWM编码器
9)电机类型:直流有刷,旋转无刷,直线无刷,音圈电机
10)控制模式:力矩/速度/位置的点到点控制,和循环同步,归零,开环矢量/标量
11)数字I/O:4x输入PLC&TTL,2x输出PLC&TTL
12)应用环境:工业,压强承受,高/低温
13)案例:深海潜水器、机器人
2.INGENIA TITAN大电流直流驱动器特点
Titan Go数字伺服驱动亮点
免费下载motionlab,编程和调整软件。
与有刷无刷直流和交流电机兼容
与线性无刷电机和音圈兼容。
独立模式的集成运动控制器。
通过USB、CANopen、EtherCAT、PWM或模拟输入指令
3.INGENIA TITAN大电流直流驱动器供应型号
INGENIA Everest超小型直流驱动器
1.INGENIA Everest XCR超小型直流驱动器特点
世界zui小体积 26x35x14mm,易于集成
嵌入完整MCU,可实现高J算法
采用世界zui先进晶体管技术,具有zui高的功率密度和效率
2.INGENIA Everest XCR超小型直流驱动器参数
1)连续电流(ARMS):30
2)峰值电流(ARMS):60
3)供电电压(VDC):8-100
4)功率(W):5000
5)尺寸(mm):26x35x14
6)通讯:USB,RS232/RS485,CANopen,EtherCAT
7)命令接口:网络接口,独立运行,模拟量输入,脉冲+方向,编码器跟随,电子齿轮,PWM
8)反馈接口:数字编码器,Sin/Cos编码器,数字/模拟霍尔,旋转变压器,SSI/BiSS/EnDAT,无传感器,直流测速机,模拟输入,PWM编码器
9)电机类型:直流有刷,旋转无刷,直线无刷,音圈电机
10)控制模式:力矩/速度/位置的点到点控制,和循环同步,归零,开环矢量/标量
11)数字I/O:8x输入PLC&TTL,8x输出PLC&TTL
12)应用环境:工业,高/低温
13)应用案例:协作/可穿戴机器人,无人ji,机器狗
14)-40 oC to +60 oC 温度
3.INGENIA Everest XCR超小型直流驱动器概述
INGENIA Everest XCR超小型直流驱动器是一款超紧凑,超级智能,性能高的伺服驱动器。
由于其小巧的尺寸和坚固的设计,它几乎可以安装在任何地方:协作机器人关节,
可穿戴机器人,无人地面或飞行qi以及内部电机。
然而,INGENIA Everest XCR超小型直流驱动器不仅仅是一个伺服驱动器。
无论您是在使用图像稳定还是步行机器人,我们都嵌入了一个完整的MCU来实现您自己的高J算法。
Everest还采用世界上zui先进的晶体管技术,具有zui高的功率密度和效率,
同时保持可忽略的EMI并提供线性放大器性能。
4.INGENIA Everest XCR超小型直流驱动器zui重要的亮点
广泛的反馈和电机支持
由于体积小,易于集成
适应恶劣环境
高J运动网络
用于用户算法的MCU
5.INGENIA驱动器供应型号
EVEREST CORE
EVEREST NET
EVEREST XCR